그리드 맵을 복수개의 룸으로 구획하는 방법 및 장치[A METHOD AND APPARATUS FOR SEGMENTING A GRID MAP INTO A PLURALITY OF ROOMS]
페이지 정보
최고관리자 0 Comments 1 Views 20-11-10 15:46 기계본문
- 기술 정보
-
-
기술분야
모바일기기
-
현재 권리자
삼성전자 주식회사
-
Main IPC
G06F-17/00
-
존속기간 만료예정일
2032-05-29
-
출원번호
(출원일)10-2012-0056975
(2012-05-29)
(2012-05-29) -
등록번호
(등록일)10-2068745
(2020-01-15)
-
기술분야
- 기술개발 목적
-
-그리드 맵은 특정 공간 영역을 복수개의 셀로 표현한 지도로서 다양한 산업 영역에서 사용됨
-그리드 맵을 구획하는 작업은 컴퓨터에 의해 자동으로 수행될 수 있는데, 이 때 그리드 맵을 구획하고자 할 때 룸의 개수가 몇 개가 되도록 구획하는 것이 가장 최적이며, 룸과 룸을 연결지어주는 지점 즉, 가장 도어의 위치는 어디로 인식하는 것이 최적인지 등은 그리드 맵 구획에 있어 가장 중요한 문제로 이러한 기술 개발이 필요함
- 기술의 효과
- -그리드 맵을 복수개의 룸으로 구획함에 있어, 룸 개수 및 가상 도어 위치 등과 관련하여 최적의 형태로 그리드 맵을 구획할 수 있어 이동 경로를 설정하고 설정된 이동 경로에 따라 동작을 수행할 수 있음
- 적용 산업분야
-

*출처 : 삼성
자율이동로봇
- 시장규모 및 전망
-
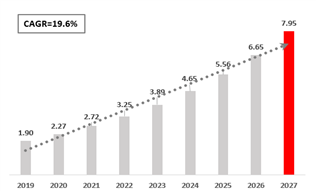
*출처 : GRAND VIEW RESEARCH, (주)SYP 재가공
글로벌 자율 이동 로봇 시장 규모는 2019년 19억 달러로 19.6%의 연평균 성장률로 성장하여 2027년 7.9억 달러에 이를 것으로 전망됨